2000年代
2000年代のロボット

屋外からの遠隔操作で災害現場へ移動し、復旧作業支援を行える原子力防災ロボット。
《特 徴》
(1)可変形状型クローラおよび複数種のセンサにより、狭あいな建屋内の通路、階段、段差、堰等の走行を実現。
(2)立体視対応全体監視カメラと作業用ツール搭載カメラにより、作業性向上。
(3)遠隔自動交換可能な特殊専用ツールを複数台搭載し、作業範囲を拡大。 ドア開け、バルブ操作から特殊試料採取作業までの幅広い作業に対応。



原子力施設での事故発生時、人に代わって事故現場の様々な情報を収集するための情報遠隔収集ロボット。役割に応じて使い分けるよう、下記の3種4台のロボットから構成される。
・RESQ-A(初期情報収集用)
小型軽量で人が持つこともでき、初期情報を迅速に収集する。
・RESQ-B(詳細情報収集用)
40°階段などを踏破して、放射線量、温湿度、距離、風向・風速など、多種多様な計測を行う。
・RESQ-C(試料等情報収集用)
2本のアームを使用して、気体、液体、個体の試料採取などを行う。

国際宇宙ステーション日本実験棟「きぼう」のための子アーム。
軌道上で既に一部建設が進められている国際宇宙ステーション上に、日本実験棟「きぼう」向けのロボットアームとして開発。200
7年スペースシャトルで打上予定。
《特 徴》
(1)宇宙ステーション上で10年以上運用される国内初の細密作業ロボットアーム
(2)「きぼう」船内からの宇宙飛行士の遠隔操作により、船外での宇宙実験に活用予定
(3)全長1.9 m、質量200 kg、6関節型

シニア向けの歩行訓練機。訓練者が歩く歩行部を左右に分かれた2本のベルトで構成し、2本のベルトを独立に動作させる。ベルトの動作モードには、設定した速度で動く定速モードと訓練者の蹴り力に追従する負荷モードがある。これにより、症状に合わせた歩行訓練が可能である。また、片方のベルトを急発進・ 急停止させて転倒刺激を発生することにより、転倒予防訓練を行うことができる。

本装置は、執刀医自身が術具を持ったまま内視鏡保持と視野の移動を行うことで、より効率よく内視鏡下手術を進めることを可能にするものである。
《特 徴》
(1)術者による内視鏡視野の移動が自在
(2)安定した視野を提供
(3)動作中の体内深部方向への移動がない安全設計
(4)ズーム機能により内視鏡先端の汚れの付着を抑制
(5)既存の内視鏡にも対応可能

脚力が低下した方の歩行を電動でアシストする歩行機である。使用者がサポータを持って歩こうとすると、内蔵の力センサで進む方向を検知し、左右のモータを独立に制御して使用者に合わせて移動する。装置の動き易さを調整できるので、使用者の歩行能力や症状に合わせて歩行を補助することが
可能である。さらに、電動の昇降機能により椅子やベッドからの立ち上がりや着座を補助することができる。
本装置はNEDOの委託を受けて開発したものである。

2003年5月に試作機の技術発表。
日本の家屋に合った世界最小「直径250
mm」のコンパクトボディ。
部屋の隅々までとどく「可動吸口」を採用
し、掃除機としての実用性を徹底追求
した。
《特 徴》
(1)「自動地図生成機能」と「スパイラル走行パターン」により、ゴミ残しの少ない走行を実現
(2) 「充電ごみ捨てステーション」との自律ドッキング機能により、約1ヶ月間ごみ捨て不要
穿孔ロボットの全体構成

加工部の構成
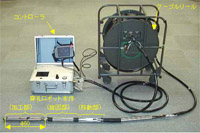
ガス配管補修ロボットを開発した。
ガス配管の内面にシールホースと呼ばれるチューブを接着材で内張りして補修する
「支管反転シール工法」において、配管内部から分岐部シールホースを穿孔するものである。
<特長>
(1)本ロボットは穿孔のための加工部、回転方向位置決めのための旋回部、軸方向位置決めのための移動部からなる。
(2)新開発のコンパクト、高剛性の工具昇降部および山型2枚刃工具により、内径50 mm配管内で低剛性のシールホースと接着材を確実に穿孔できる。
(東京ガス,日立情報通信エンジニアリングとの共同開発)

AV機器の操作支援を目的としたマルチモーダル対話技術を開発
し,ウサギ型ロボットに搭載した。マルチモーダル対話技術は,
音声情報処理技術,画像情報処理技術および番組推薦技術を統合
することにより,ユーザと対話を行う技術であり,ユーザは音声
を用いたAV機器の操作が可能となる。また,ユーザを識別する
ことにより,番組推薦などのサービスをユーザに応じて提供する。
本ロボットは,2005年10月開催のCEATEC2005に出展した。
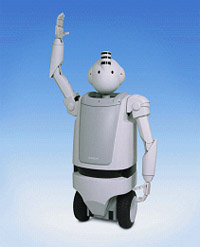
人と同じ環境で活動し、人に安全・安心や便利・ゆとりをもたらし、暮らしをサポートするロボットのプロトタイプとして開発した。
2005「愛・地球博」ではNEDO(*2)プロトタイプロボット展や日立グループ館屋外ステージでデモを実施した。
<特長>
(1)機敏な動作:倒立二輪機構とボディスイング機構を開発し、時速6 kmの移動と最小半径50 cmの方向転換を可能にした。
(2)障害物回避機能:赤外線レーダのデータから障害物を認識し、実時間(0.1 ms)で回避経路を生成するアルゴリズムを開発した。
(筑波大との共同研究)
(3)遠隔音声認識:本体搭載のマイクアレイを用いて、1 m程度離れた位置からの音声を認識する遠隔音声認識技術を開発した。
(中央研究所にて開発)
なお、本ロボットはNEDO技術開発機構「次世代ロボット実用化プロジェクト(プロトタイプ開発支援事業)」の委託を受けて開発した。
*1 EMIEW: Excellent Mobility and Interactive Existence as Workmate
*2 NEDO新エネルギー・産業技術総合開発機構
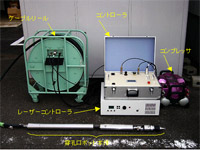
レーザー穿孔ロボットの全体構成

加工部の構成
経年ガス配管更新用レーザー穿孔ロボットを開発した。
経年ガス配管に新規樹脂配管を挿入して配管を更新する「インサーション工法」において、埋設状態で50 A,80 A樹脂配管内部から分岐部をレーザーで穿孔する装置である。
<特長>
(1)レーザー穿孔の採用で反力が発生せず装置を小型化
(2)予め分岐部に設置したターゲットをセンサで検出して穿孔位置を決定
(3)分岐管端部からの吸引で穿孔切片を回収。
本開発は,経済産業省が(社)日本ガス協会
(日立情報通信エンジニアリング)に委託した国家プロジェクト「経年内管対策更新技術開発事業」での開発成果の一つである。

空港や原子力施設等における、自律巡回監視と遠隔操縦による直接監視に併用できる無人走行ビークルを開発した。
2006年10月に開催された危機管理産業展において、広域施設内の巡回警備業務に必要な路肩追従走行、障害物回避走行などの自律走行制御機能を実証するデモを模擬環境で実施した。
<特長>
1)高速自律走行機能:
最高時速30 kmで自律走行が可能
2)障害物回避機能:
車両前方に設置したレーザレーダにより障害物を認識して障害物を自律回避
3)路肩追従機能:
マニピュレータ上に設置したレーザレーダを用いて前方の路肩を検出し、道なりに自律走行
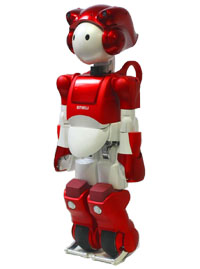
人間共生ロボットEMIEW2 *1は、オフィスビル等でのサービス実現に向けて、本質的な安全性と機敏な移動性を両立させたものである。
<特徴>
(1)脚車輪型移動機構:二足歩行の機能を備えながら、先端に車輪駆動機構を併設することで、機敏性(移動速度6 km/h)と従来不可能であった段差乗越えを実現した。
(2)軽量小型ボディ:成人女性の可搬重量15 kg以下をめざし、機構や制御系の高密度実装等により、身長800 mm、重量13 kgを実現した。
また、EMIEW 1に搭載した遠隔音声認識技術、歩行者回避技術*2を継承し、さらに自動で地図を作成するSLAM*3技術を新規に搭載した。
*1 EMIEW: Excellent Mobility and Interactive Existence as Workmate
*2 筑波大学坪内教授の研究グループとの共同研究成果
*3 SLAM: Simultaneous Localization and Mapping

コンベア移載タイプ

フォークリフトタイプ
走行ガイドを必要としない無人搬送車。(株)日立プラントテクノロジー(現(株)日立製作所インフラシステム社)が2009年4月に製品化し、国内ガラスメーカ、海外産業機器メーカなどに納入している。コンベア移載タイプ、フォークリフトタイプなどのラインナップがある。
《特 徴》
(1)電子地図ベース自律走行: 搭載したレーザ距離センサを用いて電子地図の生成と自己位置の認識を行い、地図上に設定された走行経路に沿って走行する。磁気テープ等の走行ガイドの設置を不要化し、レイアウト変更に柔軟に対応することができる。
(2)周辺環境変化対応: 電子地図を用いた自己位置認識方式と、タイヤ回転量から移動量を算出する方式を併用することで、地図と現況に差異のある区間でも走行を継続することができる。
(3)障害物自動回避: 搭載したレーザ距離センサにより設定された走行経路上の障害物を検知し、経路を変更して搬送を継続することができる。
