1990年代
1990年代のロボット

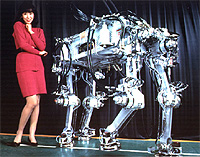
通商産業省(現経済産業省)大型プロジェクト「極限作業ロボット」(1983~1990)に於いて、原子力プラント内作業を目標として開発したトータルシステム。日立はこの内、脚移動機構を開発。
《特徴》
(1)寸法質量:1270L×715W×1880H、約700 kg
(2)移動方式関節型4脚歩行方式(電動駆動)
(3)自律に支援された遠隔操作ロボット
(4)階段、堰、扉の通過が可能

重量20 kg、全長0.3 mの小型歩行ロボット。倒立振子型の脚運動制御によりエネルギー効率の良い四脚動歩行が可能。1991年ニューヨーク、ロンドンで開催された海外日立技術展に出展。

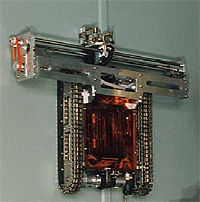
原子力発電所の定期検査時に原子炉制御棒駆動機構を遠隔自動で取外したり取付けするロボット。 円形のプラットホームに走行と昇降する取扱装置を備え、制御棒駆動機構のフランジ部ボルトの締めや緩めを遠隔で行う。 遠隔操作室ではカメラ映像や3Cグラフィックの画像により監視しながらワンマンコントロールが可能。

半導体製造工場のクリーンルーム内でウェハーカセットを搬送し、製造設備に受け渡すロボットを開発した。 旋回・斜行・横行など全方位走行可能な自在走行機構に、6自由度クリーンアーム(クラス10対応)を搭載した。 これにより、工場内レイアウトの変更や、製造設備のカセット受入部の改造を行うことなく、ウェハーカセット搬送を自動化できた。
通商産業省(現経済産業省)大型プロジェクト「極限作業ロボット」(1983~1990)に於いて、原子力プラント内での床面移動技術の要素技術として開発したプロトタイプ。
《特徴》
(1)脚長:0.9m、総質量:300kg
(2)関節:24自由度、内12自由度が油圧駆動
(3)動歩行により平地を移動:最大歩行速度:2.5km/h
(4)階段、段差を静歩行にて踏破

次世代生産システムのコンセプト「ヒューマンフレンドリファクトリ」に基づいた受注生産向きの販売支援システムと自立型フレキシブルロボットを開発し、1991年日立技術展に出展した。特徴は以下の3点。
1)顧客要求に最も良く合う製品を提案する営業パートナーシステム
2)生産能力や納期の変更を即時反映する生産計画システム
3)作業内容に応じて設備構成の組換えが可能な組立システム

原子炉格納容器内のように、プラント運転中は人が立ち入ることが困難な場所の監視を可能とした小型監視点検ロボット。
ロボットには、ズーム付
TVカメラ、赤外線カメラ、マイクロフォンなどの各種センサを搭載し、狭い場所でも移動・監視が可能なように小型化が図られている。

このマニピュレータは、双腕型の多関節マニピュレータであり、関節要素及びハンドが交換できる構造となっている。
アームの関節数や関節配置を変更して、配管などの障害物を自動的に回避したり、作業内容に応じてハンドを自動交換できるという特徴がある。
原子炉圧力容器などの壁面に吸着しつつ移動して、超音波探傷試験を行うロボット。
ロボットの自重を、壁面に吸着する磁石片全体に分散して伝達する「負荷分散型磁気クローラ機構」を用いることで、ロボットの壁面吸着力を高めている。
小型化・高速化が容易で、軌道が不要なことから、検査範囲の拡大を図ることが可能。

衛星と宇宙ロボットとの複雑な干渉作業を、地上で模擬する無重力作業シミュレータを開発。衛星とロボットの動作を、2台のロボットの動きで模擬し、宇宙作業をグラフィック画面上で簡単に指示できるシミュレ-タで、無重力環境におけるロボットの挙動を地上で評価することができる。

自律走行により芝刈り作業を行う。光ファイバージャイロや車輪センサを利用したINS航法とRTK-GPSにより制御される。制御部はトラクタ等の屋外移動車にも適用された。 写真は柏レイソルズのスタジアムの芝管理用に開発された機械。
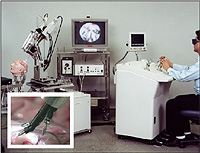
患者への負担を小さくする低侵襲手術支援システムとして、直径10 mmの外筒内に3本の微細マニピュレータ(直径 3 mm、3自由度、先端位置決め精度20 μm)と
内視鏡(直径4 mm)とを備える脳外科用手術支援システムを開発し、2002年8月、脳外科手術分野で世界初の臨床試用に成功。
本装置はNEDOの委託を受けて開発したものである。
![]()
![]()
飛行実証試験用シャトル搭載システムのロボットアーム。
日本実験棟「きぼう」向けのロボットアームの事前実証試験として、スペースシャトルで
1997年に打上られ、宇宙空間で所期の成果を得た。細密作業ロボットとしては世界初の宇宙ロボットアーム。
《特徴》
(1)スペースシャトルに搭載し、約2週間、宇宙空間で細密作業のデモ試験を実施
(2)スペースシャトル船内からの宇宙飛行士の遠隔操作により、ドア開閉、機器交換作業や地上からの遠隔操作実験を実施
(3)全長1.5 m、6関節型

原子力発電所の原子炉内などの水中での目視点検を遠隔で行うロボットで、狭い場所にも入れるよう小型化を図っている。 スラスタにより水中を遊泳し位置と姿勢を制御して目的の場所を点検する。他にも複数タイプがあり、オプションとして、超音波探傷装置等を追加することも可能。
