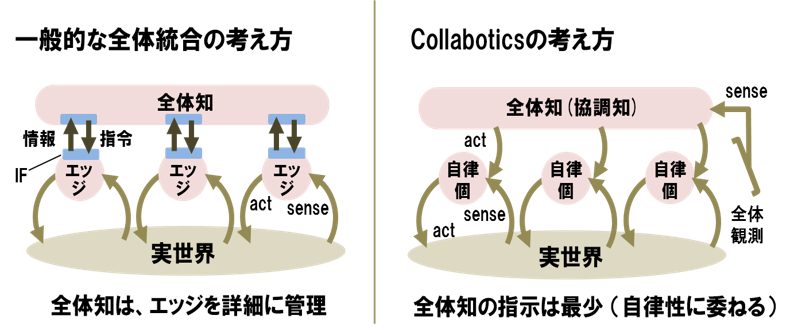
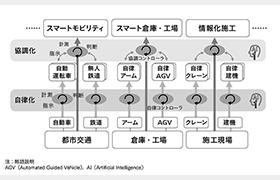
知能を持った複数の異なるロボットの柔軟性と効率性を両立させる自律協調技術(Collabotics)です。製造・物流をはじめとする各種産業分野において、エンドユーザーのニーズ多様化や人手不足に対応するため、高度な作業要求とその変化に持続的に対応できる自動化に向けた技術の研究を進めています。日立のAI研究では、それぞれが局所的な最適性や頑健性を保ちながら自律的に動く知能を持った複数の異なるロボットを、その上位レイヤーでシステム全体を管理する知能(全体知)が賢く協調させることで、柔軟性と効率性を両立させた自動化を実現する「自律協調: Collabotics」のコンセプトを提唱しています。この考え方により、自律した各要素(自律個)の追加や分離、動作ロジックの変更に対し、全体知は柔軟な対応が可能となり、システム全体の持続的な進化が可能となります。また、目的や用途に特化した複数のシミュレータを連携させ、データやパラメータ、分析結果の共有・見える化などを統合的に管理することで、物理現象、ロボットの個別動作と協調動作、経営への影響など、さまざまなレイヤーでの分析や設計を俯瞰的に実施できるようにするため、システム全体を仮想空間上にデジタルツインとして実現するための統合シミュレーション環境「Collaboticsシミュレータ」の開発も進めています。