登録済み物品データの再学習を不要とし、従来の1/3以下の工数で新規物品を登録
2021年4月14日
株式会社日立製作所
日立は、物流倉庫などでピッキング作業を行うロボットに搭載するAI向けに、従来の1/3以下の工数*1で新たな物品を追加登録できる学習技術を開発しました。従来は、新規登録に伴い、登録済みの物品データの再学習が必要で、学習や動作保証に対する確認作業に時間を要していました。本技術では、開発したインクリメント型AI学習により、動作の確実性や速度などに影響を及ぼすことなく、追加する物品のみ学習することが可能です。今後、本技術を、日立が提唱、開発しているCollabotics(自律・協調)*2の技術コンセプトの一要素とし、柔軟性と効率性を兼ね備えた物流オペレーションの自動化を実現していきます。
本成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務(JPNP16007)の結果得られたものです。
従来は、新しい種類の物品が追加されるたびに、登録済みの物品を含む全ての物品について、認識のためのDNN*3モデルの再学習が必要であり、学習やその検証に時間を要し、品種が増えるにつれて、その手間が増大していました。今回、システムに追加された新しい種類の物品に対して、その物品の認識に特化したDNNモデルのみを新たに学習するインクリメント型AI学習技術を開発しました。これにより、登録済の物品に対する再学習が不要となり、登録済みの物品に対する認識精度を維持したまま、新しい物品の追加登録が容易になりました。
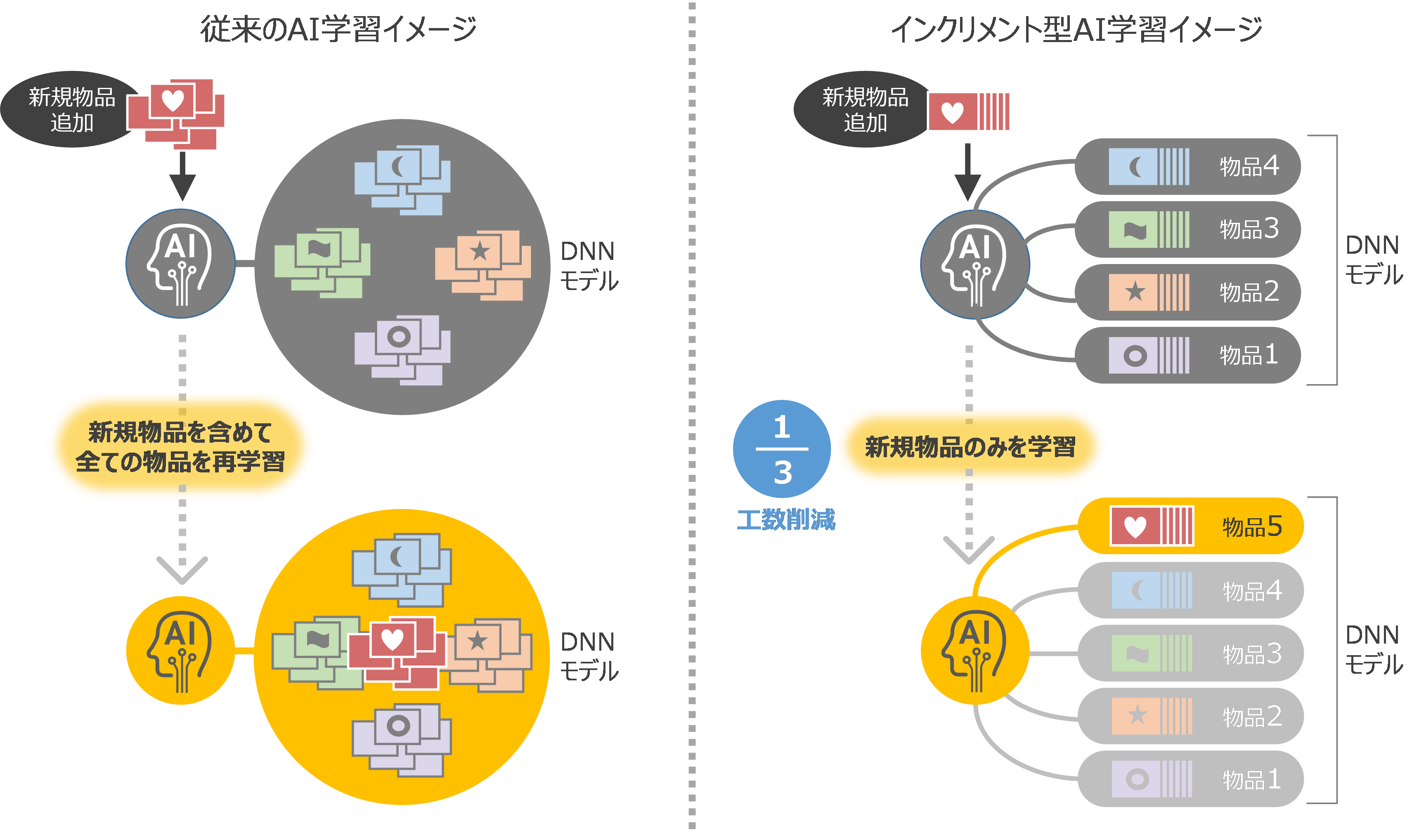
従来のAI学習とインクリメント型AI学習の比較
DNNモデルを学習するためには、その物品種に対する大量の画像と、それに対するアノテーション(ラベル付け)が必要となりますが、アノテーションされた数多くの画像を準備することは容易ではないため、シミュレーションによりこれらを生成する技術*4が知られています。しかし、エッジデバイスに搭載可能な軽量のDNNモデルをシミュレーション生成画像により学習し、現場の実画像の認識に適用したところ、物品認識精度が著しく低下する問題がありました。今回、シミュレーション生成画像で学習後、少量(約15%)の現場の実画像でさらに学習する技術を開発しました。これにより、学習するDNNモデルのサイズを1/10に低減しても、現場の実画像に対して、96%以上の認識精度を維持できることを確認しました*5。
インクリメント型AI学習では、各物品種を認識するためのDNNモデルが別々に存在します。そのため、全ての物品種を網羅した認識を行うためには、これらのDNNモデルを全て動作させる必要がありますが、これらを逐次動作させると、認識に時間を要します。そこで、ハードウェアのマルチスレッド機能を活用して、上記2の技術により学習した各物品種用の軽量DNNモデルを並列に動作させる技術を開発しました。各スレッドに各DNNモデルの実行を割り当てることで、物品種の識別や位置検出を約2倍高速に行うことが可能になりました。
