注目ユースケース
Lumadaのユースケースコード:UC-01803S
~先進デジタル技術で災害・未知環境でのロボット遠隔作業を効率化~
2022年3月18日
災害や事故によって人が立ち入れない場所では、ロボットによる調査を活用し、現場の環境を確認しながら、安全かつ正確に作業を進めることが期待されます。今回は、遠隔で動作するロボットの作業データを活用して、オペレーターの技量に依存せずに作業を効率化するユースケースを紹介します。
日立は、OTとITを掛け合わせた先進デジタル技術で、ロボット自律制御の研究、開発を進めています。遠隔で動作するロボットの操作に、最新の現場データに基づく自律制御を適用することで、人が長時間立ち入れない場所での調査、作業を効率化。このような最新技術を活用して、日立は福島第一原子力発電所の事故復旧に全力で取り組んでいます。
Lumadaで社会課題の解決に貢献!現場のデータから環境の変化をとらえる
災害の影響を受けた現場では、一刻も早く被災状況を確認し、早急に復旧作業を進める必要があります。
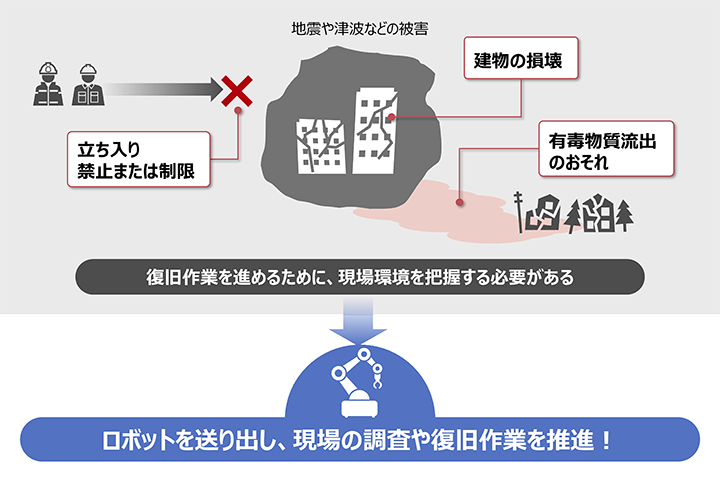
地震や津波などの被害を受けた現場には、建物の損壊、機器の破損による有害物質流出のおそれなどさまざまな危険があります。不確定性を含む現場では、作業による大きなけが、健康への影響が懸念されるため、状況が確認されるまで、人の立ち入りは禁止または制限されます。
被災前と異なる未知環境で復旧作業を進めるためには、現場環境の把握が最優先の課題です。人が立ち入れない状況下では、現場にロボットを送り出して、環境を把握するためのデータを取得。分析によって人が近づけないと判断された場合は、復旧作業もロボットで推進することになります。
このような現場でロボット動作の正確さや速さを向上させ、信頼性を高めるためには、刻々と変化する現場の環境を、リアルタイムに把握することが求められます。
「今、現場がどのような状況か」を常に把握し、状況に応じて適切に作業を進めるためには、ロボットが取得したデータの活用が有効です。被災の影響を受けない場所で、現場の状況をリアルタイムに確認しながら最適な操作を実施することで、オペレーターの負荷軽減とヒューマンエラーの低減を実現。ロボットの遠隔作業を確実に推進できます。
また、作業進捗や現場環境の最新情報をロボットの動作にフィードバックすることで、ロボットが自律的に最適な動作を判断。簡易な作業の自動化により、現場での思考時間を低減し、作業時間を短縮できます。さらに、ロボットが自律的に動作すると、オペレーターの技量に依存せずに作業できるため、人財を確保しやすくなるうえに、熟練度に頼らない作業品質の維持も実現します。
原子炉内部の環境を把握し、遠隔ロボット作業を支援
東日本大震災での事故以来、福島第一原子力発電所では廃炉に向けた作業が進められています。事故後の廃炉作業は世界でも前例がなく、技術的に困難な取り組みです。
作業を困難にしている原因の1つは、放射線量の高さです。
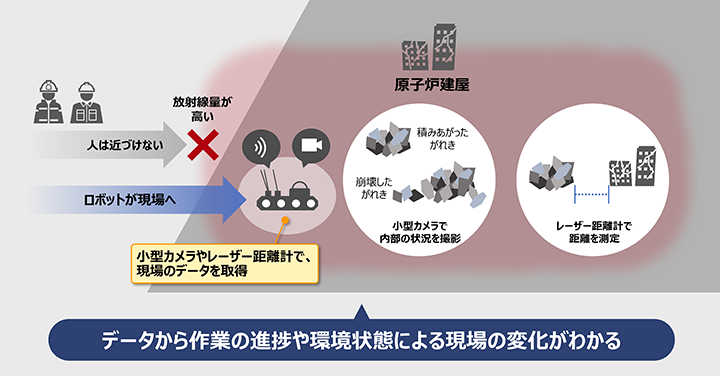
福島第一原子力発電所の原子炉建屋には、使用済みの核燃料が残っているだけでなく、事故によって原子炉内部の核燃料が溶け、さまざまな構造物と混じりながら冷えて固まった「燃料デブリ」もあります。継続的な注水による冷却で安定した状態を保っていますが、今なお放射線のリスクがあることに変わりはなく、人は近づくことができません。
立ち入りが難しい原子炉建屋で、作業を安全かつ合理的に進めるためには、ロボットの活用が欠かせません。小型カメラやレーザー距離計を備えたロボットは、人に代わって作業現場に行き、作業の進捗や現場環境の変化などのデータを取得します。
ロボットが取得したデータを収集・蓄積し、日立独自のデジタル技術で分析・見える化することで、遠隔作業ロボットを操作するオペレーターの負荷軽減と、遠隔作業の効率化を図れます。
たとえば、ロボットから収集したデータとAIを活用すると、人は現場から離れた放射線量が低い場所で、現場の作業状況をリアルタイムに把握できます。
また、最新のデータに基づいてロボットの動作を自律制御すると、ロボットが現場の状況に合わせて動作するため、オペレーターの技量に依存しない作業が見込めます。
廃炉作業に向けて研究・開発を進めている、日立のロボット技術が支援できる事例を紹介します。
データ分析や画像処理により、現場の作業状態を把握できます。
作業用ロボットが撮影したがれきなどの画像データをAIで分析し、つかむ向きを操作画面に自動で表示します。また、3D処理で高さ情報を表示すると、重なり状況を把握できます。
作業用ロボットに設置した位置センサーで、現在位置を推定します。さらに、VRシミュレーターと連携したリアルタイム表示により、ロボットの動作状況を3D映像で確認できます。

簡易な作業は自動化しつつ、オペレーターの意思決定が必要な作業では自律的に停止する運用もできます。
アームロボットががれきなどの回収物に接近し、重なり状況を把握して持ち上げ、運搬ロボットに乗せるまでの一連の動作を自動化。ロボット操作歴が浅いオペレーターと同等以上の速度で作業できます。

環境データから生成された地図を基に、設定された始点から終点までをロボットが自動で走行します。走行経路上に狭隘(あい)部がある場合も、ロボットの自律制御によって衝突や乗り上げなどを回避して走行できます。

現場のリアルタイムなデータを活用したロボットの自律制御は、廃炉作業の現場だけでなく、さまざまな災害や事故の現場、さらには宇宙や地中、海中などに応用できる技術です。
日立は、不確定性を含む未知環境での調査や作業では、人とロボットの有機的な連携が重要と考えます。先進デジタル技術を活用し、現場環境をリアルタイムに認識することで、オペレーターの負荷軽減と作業の効率向上を両立。過酷で変化が発生しやすい環境でのロボット遠隔作業に貢献します。
原子力分野における日立のロボット技術については、こちらをご覧ください。
日立は、OTとITを掛け合わせた先進デジタル技術で、ロボット自律制御の研究、開発を進めています。遠隔で動作するロボットの操作に、最新の現場データに基づく自律制御を適用することで、人が長時間立ち入れない場所での調査、作業を効率化。このような最新技術を活用して、日立は福島第一原子力発電所の事故復旧に全力で取り組んでいます。
本ユースケースについて詳細が知りたい方は、下記のフォームにてお問い合わせください。
お問い合わせの際には、ユースケースコードをご記入ください。
Lumadaのユースケースコード:
UC-01803S
日立グループは、あらゆる業種のご相談を承ります。
気になるポイントなどございましたら、ぜひお気軽にお声がけください。
