ページの本文へ
店舗や公共空間でのサービス業務支援を行う自律ロボット「EMIEW3」とロボットIT基盤のご紹介です。
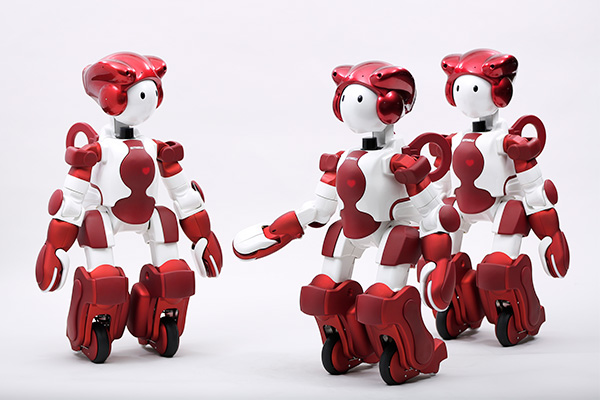
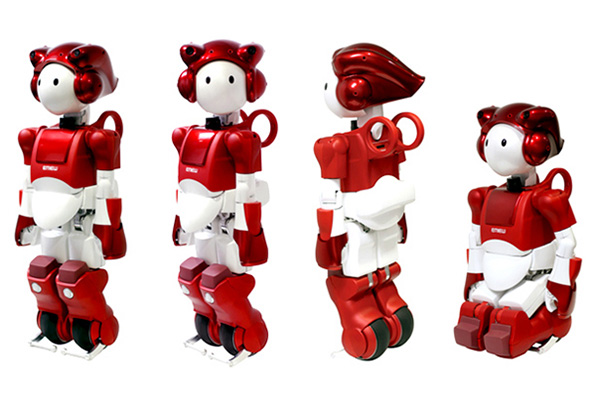
人と共存し人をサポートする機敏で小型軽量な対話型ロボット「EMIEW2」のご紹介です。
人と対話して行動するヒューマノイド型ロボット「EMIEW」のご紹介です。
障害物を避け自律走行しながら物品を運搬する物流支援ロボットを開発しました。
日立で現在までに研究されてきたロボットに関する主要な研究成果を掲載しています。
機械