ルールを介した相互連携を可能とするサイバー・フィジカル・システムにより新たな安全機能を提供
2021年3月31日
株式会社日立製作所
日立は、人と、自律的に動作する機械(以後、自律機械)が混在して作業する倉庫や工場などの作業現場において、人の安全確保と作業の効率向上を両立して実現するシステム制御技術を開発しました。本技術は独自の「共生安全」コンセプトにより実現したもので、物流・生産・輸送事業の変革に貢献します。
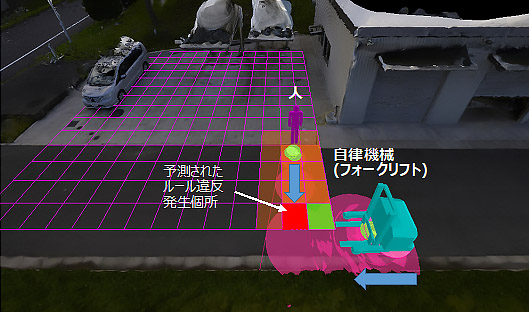
図1 人と自律機械の動きをセンサで検知し、衝突などの危険を予測
人と自律機械が混在した作業エリアを対象とし、本技術の効果を検証しました。「共生安全」コンセプトにより作業エリアに応じた安全ルールを設定し、人と自律機械の行動の安全性を判定、制御することで接触事故を防止できること、また、人がルールに違反した行動を取った場合でも、自律機械を迅速に停止できることを確認しました。さらに、見通しの悪い通路において、安全確保のため自律機械の速度を落とし接触事故を防ぐ従来の方法に比べ、本技術では作業効率を約30%向上できることをシミュレーション評価により確認しました。
上記シミュレーションによる評価技術はFraunhofer Institute for Cognitive Systems IKSとの共同研究成果です。
本コンセプトでは、互いに認識や意思疎通のない異種システム(人と自律機械)に対し、作業エリアの管理者が両者の接触事故防止と、作業効率の向上を同時に実現するための安全ルールを策定します。そのルールに従うように人と自律機械の動きを制御するとともに、何らかの原因でルール違反が生じた場合に自律機械を安全に停止させる方式です。本コンセプトは、(1)作業エリア内の人と自律機械の動きを検知する複数のセンサ、(2)センサからの情報を統合的に処理、人と自律機械に対し移動を許可する領域を設定し、ルール違反を検知した場合に自律機械に停止指令を出す共生安全サーバ、さらに、(3)自律機械、の三者の連携技術により実現されます。具体的には、人の動きの検知・制御と、自律機械の動きの検知・制御という異種のシステムを、作業エリア内に設定された安全ルールを介して互いに連携させることで、作業の全体最適を実現するサイバー・フィジカル・システム(以後CPS)を開発しました。
上記CPSでは以下二つの技術が利用されます(図2)。第一に、システムの安全検証が可能なシミュレーション技術を用いて作業エリアにルールを適用した際の安全性や作業効率を評価します。策定したルールに対し、人と自律機械の現在および将来予測される位置の情報を用いて、共生安全サーバが移動を許可する範囲(以後、排他領域)を自律機械に割り当てることでルールを順守させます。共生安全サーバは作業エリア内の人と自律機械の行動範囲をグリッド状に管理し、センサからの情報により排他領域を動的に更新しながら、排他領域外に自律機械が出ないように制御します。
第二に、機械やシステムの異常により自律機械が排他領域外に出る、あるいは、自律機械が移動するグリッドの範囲内に他者が侵入することが予測された場合に(図1)、共生安全サーバが自律機械に対し迅速に停止指令を出す遠隔安全保護の仕組みです。
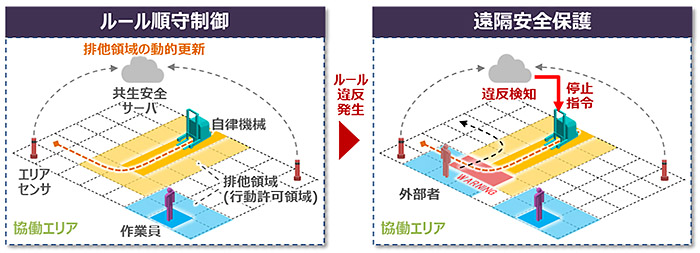
図2 「共生安全」コンセプトを実現する、自律機械(フォークリフト)と人のルール順守制御技術/ルール違反時の遠隔安全保護技術
