ネットワーク制御と深層学習処理をハードウェア実装し1ミリ秒の反射動作制御を実現
2020年3月18日
株式会社日立製作所
日立は、ロボットなどの限られたスペースに搭載可能なサイズで、振動や人との衝突などの外部要因に対して、反射的な動作制御を可能とする高速性を備えたコントローラシステムを開発しました。開発したコントローラシステムは、深層学習処理で獲得した動作制御を実行する小型エッジコントローラ、センサやモータ等の入出力処理を行う小型I/Oコントローラ、これらをつなぐリアルタイムネットワークで構成されます。各コントローラに搭載されるFPGA*1内にハードウェア回路を実装することで高速処理を実現し、外部要因に対して1ミリ秒で応答できることを検証しました。これにより、センサやモータなどのモノの近くに実装できる小型化と外部要因に対する反射的な動作で安全性向上を実現します。今後日立は、ロボットをはじめとする機械システムの自律化への本技術の活用を通し、少子高齢化で深刻化する人手不足の解消への貢献をめざします。
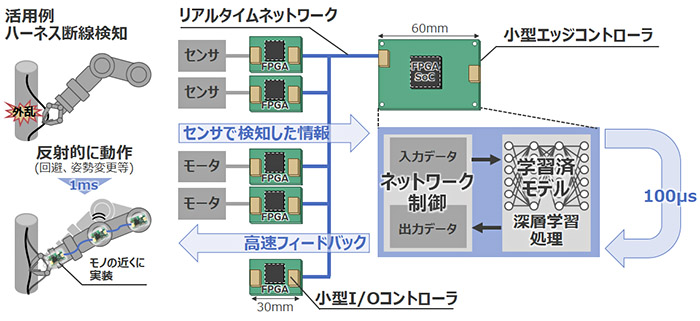
図1 開発したコントローラシステムの構成
ロボットシステムは、アプリケーション毎に入出力の数が異なり、最大数に合わせるとコントローラのサイズが大きくなります。入出力数が可変なネットワーク型では、ネットワーク制御による遅延でリアルタイム処理が難しくなります。そこで、制御向けに簡易化した独自プロトコルを開発し、これを実行するネットワーク制御を、各コントローラにハードウェア実装することでリアルタイムなネットワーク処理を実現しました。また、I/Oコントローラは必要最低限の機能のみ搭載する上下2枚基板構成(図2の上:通信基板+下:I/O基板)でそれぞれ小型化しました。リアルタイムネットワークと小型コントローラにより、対象とするアプリケーションに応じて最適なシステムを構築できます。
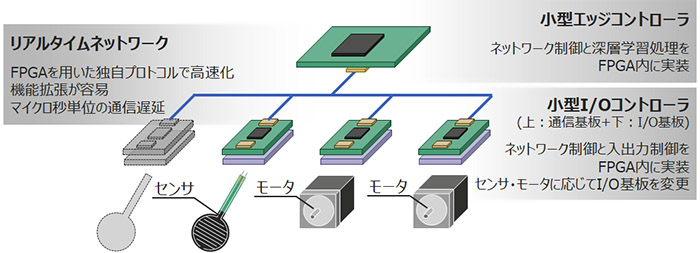
図2 リアルタイムネットワークの仕組み
深層学習による制御処理は、従来のプログラミングによる処理より多くの計算を行う必要があり、ロボットなどに搭載する小型のCPUではリアルタイム性に課題があります。そこで、小型エッジコントローラには、CPUとFPGAが1チップ化された半導体(FPGA SoC*2)を搭載し、ソフトウェア(CPU)とハードウェア(FPGA)の双方で協調制御する仕組みとしました。FPGA上には、新たに開発した深層学習を処理する集積回路とリアルタイムネットワークの通信処理を行う集積回路を搭載し、CPU上のソフトウェアからこれらの集積回路を制御します。反射動作制御に必要な処理はハードウェアのみで高速フィードバック制御する構成で、リアルタイム処理を実現します。
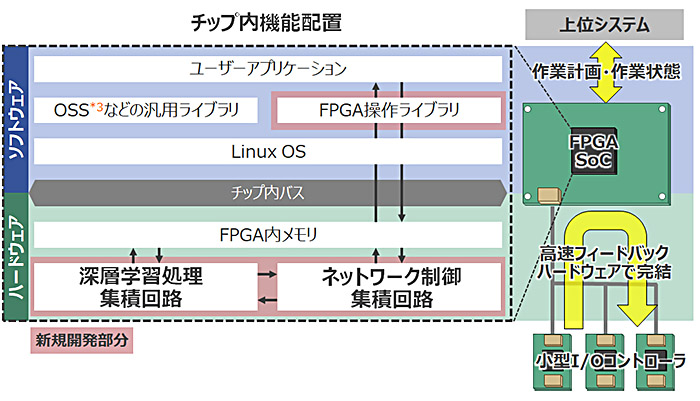
図3 ソフトウェア・ハードウェア協調制御する小型エッジコントローラの仕組み
