2018年5月28日
ロボットアームと搬送台車を統合制御して、効率的なピッキング作業を実現する複数AI協調制御技術を開発
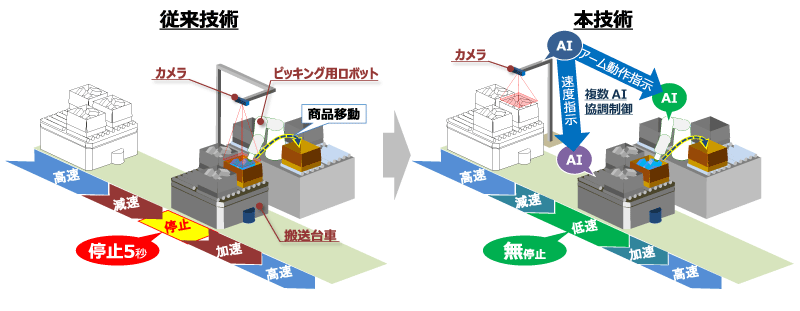
ピッキング用ロボットによって搬送台車に積まれた商品を取り出す際の技術比較
日立は、ピッキング用ロボットと自律走行する搬送台車を統合制御することで、搬送台車に積まれた商品群の中から指定の商品をスムーズに取り出し、ピッキング作業を効率化する複数AI協調制御技術を開発しました。
本技術により、商品の荷積み状態に基づいて、搬送台車とロボットアームは最適な速度で互いに衝突することなく近づき、搬送台車の移動を止めることなくスムーズに商品をピッキングすることが可能です。
搬送台車を都度停止させてからピッキングを行う従来技術と本技術の比較実験を行った結果、ピッキング作業の所要時間を38%短縮できることを確認しました。今後、日立は、本技術を搭載した倉庫作業ロボットシステムの製品化をめざすとともに、作業の自動化や高速化技術の開発を通じて、物流の効率化に貢献していきます。
なお、本技術のうち、搬送台車の動きに合わせてロボットアームの動作を計画し、微修正する機能は、英国エディンバラ大学と共同で開発したものです。
このニュースは、以下の新聞、Webサイトなどに掲載されました。



